三菱PLC FX5U多个旋转台的执行方法
作为DRVTBL、DRVMUL指令的多个旋转台的执行方法,有步进运行和连续运行两种,以下就各自的执行方法做说明。
一、步进运行
步进运行按照使用DRVTBL指令指定的旋转台的顺序依次执行。
虽然每次旋转台结束时结束标志位置为ON,但不自动执行下一个旋转台。如果检测出旋转台切换指令或外部开始信号,将执行下一个旋转台。
下图为旋转台1~3中使用停留时间的步进运行时的动作示例。
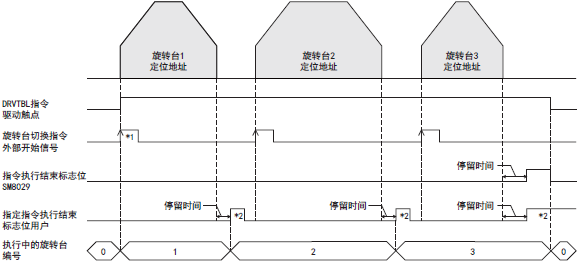
*1 外部开始信号有效时,启动定位指令需要将驱动触点和外部开始信号置为ON。
*2 在用户置为OFF或切换至下一个旋转台前不置为OFF。
动作:就步进运行时的旋转台、标志位的动作做说明。
1、旋转台的动作
• 步进运行时的各个旋转台动作与仅执行1个旋转台时相同。
• 执行控制方式[0:无定位]的旋转台、DRVTBL指令中指定的最终旋转台时,以全部旋转台结束作为条件。
但是,起始旋转台>最终旋转台时,通过执行最多旋转台数或控制方式[0:无定位]结束。
• 在旋转台结束之前,即使将旋转台切换指令或外部开始信号置为ON,也不切换至下一个编号的旋转台。
上一个旋转台结束后,通过旋转台切换指令或外部开始信号,开始执行下一个旋转台。
• 正在执行的旋转台异常结束时,之后的旋转台将不动作。
• 无论正常结束或是异常结束,按每个指令驱动从起始旋转台开始。不从上一次结束的旋转台继续动作。
• 有支持剩余距离运行的控制方式。
2、通过控制方式进行动作
• 如果执行控制方式[0:无定位]的旋转台时,将视为全部的旋转台已正常结束,结束标志位置为ON。之后的旋转台将不动作。
• 控制方式[10:附带条件跳转]在执行旋转台时进行条件判定,并立即执行下一个编号的旋转台。
• 控制方式[4:可变速度运行]、[5:附带表格转移的可变速度运行]时,检测出脉冲减速指令并减速停止后,在停留时间后结束标志位置为ON,并可以执行下一个旋转台。控制方式[5:附带表格转移的可变速度运行]时,通过脉冲减速停止指令进行减速停止,并通过检测出中断输入信号2进行减速停止,将可以执行下一个旋转台。
3、标志位的动作
用户指定的定位结束标志位在每个旋转台都置为ON。ON后的结束标志位,在用户置为OFF或下一个旋
转台开始时将置为OFF。指令执行异常结束标志位(SM8029)在全部旋转台结束时置为ON。
4、通过旋转台(操作数)设定进行动作
• 与执行单一的旋转台相同,在动作中可以变更操作数。
• 也可混用绝对地址、相对地址。
支持的控制方式:各旋转台的控制方式指定步进运行时的动作如下所示。
┌────────────────┬───────────────┐
│ 控制方式 │动作 │
├────────────────┼───────────────┤
│0:无定位 │指定时,不输出脉冲。正常结束 │
├────────────────┼───────────────┤
│1:1速定位(相对地址指定) │正常动作。 │
├────────────────┼───────────────┤
│2:1速定位(绝时地址指定) │正常动作。 │
├────────────────┼───────────────┤
│3:中断1速定位 │正常动作。 │
├────────────────┼───────────────┤
│4:可变速度运行 │正常动作。 │
├────────────────┼───────────────┤
│5:附带表格转移的可变速度运行 │正常动作。 │
├────────────────┼───────────────┤
│6:中断停止(相对地址指定) │正常动作。 │
├────────────────┼───────────────┤
│7:中断停止(绝对地址拍定) │正常动作。 │
├────────────────┼───────────────┤
│10:附带条件跳转 │按暇跳转目标旋转台。 │
├────────────────┼───────────────┤
│20:插补运行(相对地址指定) │正常动作. │
├────────────────┼───────────────┤
│21:插补运行(相对地址指定对象轴) │指定时,不输出脉冲。异常结束。│
├────────────────┼───────────────┤
│22:插补运行(绝对地址指定) │正常动作。 │
├────────────────┼───────────────┤
│23:插补运行(绝对地址指定对象轴) │指定时,不输出脉冲。异常结束。│
└────────────────┴───────────────┘
二、连续运行
连续运行在旋转台和旋转台之间不减速停止,进行连续的动作。指定的定位地址的输出结束的位置,将成为下一个旋转台的开始地址。
定位结束标志位在指定的旋转台全部执行结束后置为ON。与步进运行不同,不需要旋转台切换指令。
下图为连续运行旋转台1~5(有停留时间)时的动作示例。
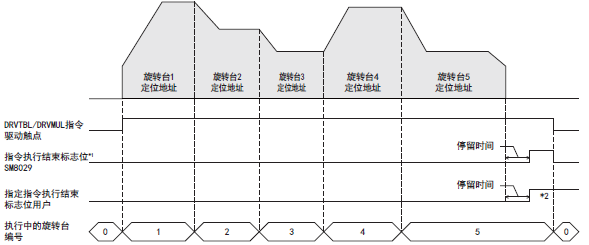
*1 仅DRVTBL指令进行动作。
*2 在用户置为OFF前不置为OFF。
动作:就步进运行时的旋转台、标志位的动作做说明。
1、旋转台的动作
• 从减速停止开始到结束标志位置为ON为止的时间,成为最终旋转台的停留时间。
• 连续运行方向变化的旋转台时,先暂时减速停止,再向反转方向输出。从脉冲输出停止
开始到向反方向输出为止的时间为1ms+扫描时间。
• 正在执行的旋转台异常结束时,之后的旋转台将不动作。
• 如果执行了不能组合的旋转台,将异常结束。此时,将不能组合的之前的旋转台作为最终旋转台进行动作。之前的旋转台进行减速停止,经过停留时间后,异常结束标志位置为ON。
此外,停留时间也变为之前旋转台设定的时间。
• 有支持剩余距离运行的控制方式。
2、通过控制方式进行动作
• 如果执行控制方式[0:无定位]的表时,将视为全部的旋转台已正常结束,定位结束标志位置为ON,之后的旋转台不动作。
• 在前方2个旋转台时决定控制方式[10:附带条件跳转]的跳转条件。(例:旋转台8为控制方式[10:附带条件跳转]的旋转台时,在旋转台6开始时进行条件判定。)控制方式[10:附带条件跳转]的跳转目标还进行控制方式[10:附带条件跳转]时,将同时判定跳转目标的控制方式[10:附带条件跳转]的条件。
3、通过旋转台(操作数)设定进行动作
• 为了让旋转台切换的次数在10ms/1次以下,请设定各旋转台的指令速度、定位地址(附带条件跳转除外)。 旋转台切换的频率高于上述次数时,将来不及进行旋转台的切换处理,减速停止后异常结束(动作到能够正常读取的旋转台为止)。
• 连续运行时,仅可对最终旋转台进行定位地址的变更。即使改写最终旋转台以外的定位地址,也将被忽略。
• 关于最终旋转台的定位地址的改写,地址的增加方向、减少方向均可变更。变更为减少方向、超过已
变更后的地址时和向减速停止所需要的脉冲不足的地址变更时,减速停止后向反转方向输出脉冲,到达变更后的定位地址(与DRVI/DDRVI、DRVA/DDRVA指令时的动作相同)。
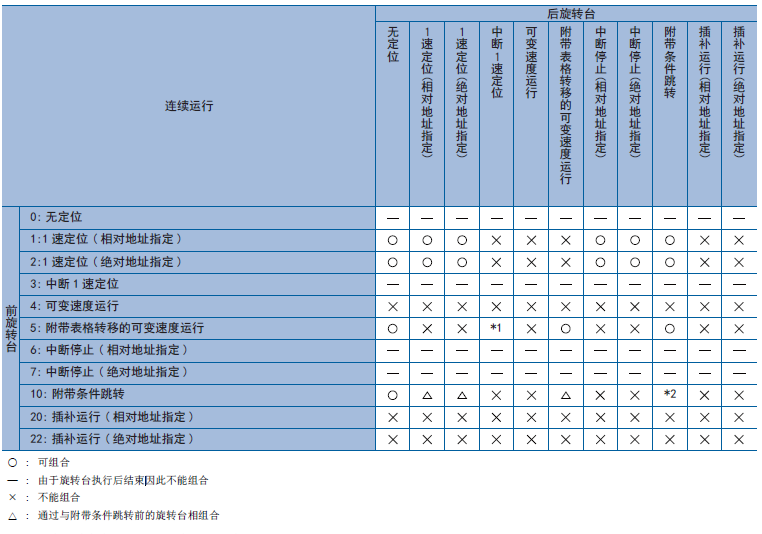
支持的控制方式:连续运行时可组合的控制方式如下所示。
%H}IF_PA0AP.hc)
*1 第2个旋转台为控制方式[3:中断1速定位]时可组合
*2 可组合至连续运行3次为止
旋转台的不执行:
在连续运行中,设定定位地址为无需定位的旋转台,将不执行直接切换至下一个旋转台。
不执行的条件如下所示。
┌────────────┬─────────────────────┐
│ 控制方式 │旋转台不执行条件 │
├────────────┼─────────────────────┤
│1:1速定位(相对地址指定) │定位地址=0 │
├────────────┼─────────────────────┤
│2:1速定位(绝对地址指定) │定位地址=相应旋转台执行开始时的当前地址*1 │
├────────────┼─────────────────────┤
│6:中断停止(相对地址指定)│定位地址= 0 │
├────────────┼─────────────────────┤
│7:中断停止(绝对地址指定)│定位地址=相应旋转台执行开始时的当前地址*1 │
└────────────┴─────────────────────┘
*1 进行了如下所示指定时,将不执行。
旋转台No.1:控制方式[1:1速定位(相对地址指定)]的定位地址为2000
旋转台No.2:控制方式[2:1速定位(绝对地址指定)]的定位地址为2000
 销售部专线: 13418749887
销售部专线: 13418749887  全国服务热线:13418969887
全国服务热线:13418969887
