三菱PLC FX5U使用旋转台运行指令进行定位编程(FX5U定位编程)
一、FX5U旋转台运行指令
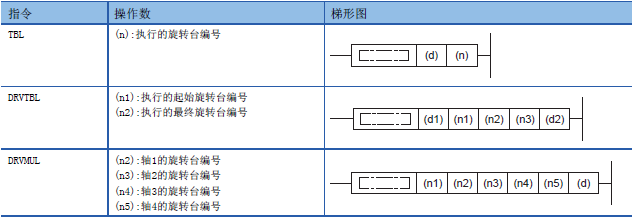
设定旋转台数据后,请创建使用旋转台的程序。如果在旋转台运行指令的操作数中指定旋转台No.,则执行相应的旋转台。各旋转台运行指令的指定操作数如下所示。
二、编程时的注意事项 1、同轴的定位指令
• 请不要驱动多个同轴内的定位指令。定位动作的脉冲停止且在定位指令的驱动触点未置为OFF前,不能驱动同轴的定位指令。
• 脉冲输出中监控置为ON时,使用该轴的定位指令不能执行。此外,即使指令驱动触点置为OFF,在脉冲输出中监控置为ON的期间,也请不要执行指定了同一轴编号的定位指令。
2、定位指令的程序数
定位指令的程序次数没有限制。即使多次使用相同指令也没有问题。
3、外部开始信号
外部开始信号为有效且置为OFF时,使用该轴的定位指令可以执行。执行需要将指令的驱动触点置为ON,且将外部开始信号置为ON。
4、定位指令的驱动时机
a)、使用绝对位置检测系统时
使用绝对位置检测系统的轴,请在伺服上电时驱动DABS指令。ABS数据读取结束后,将保持伺服ON状态(SON置为ON),在DABS指令置为OFF时解除伺服ON。请在DABS指令结束ABS数据读取后,进行其他定位指令的动作。
b)、脉冲输出监控置为ON时
脉冲输出中监控置为ON时,使用同一轴编号的定位指令(DABS指令除外)不能执行。此外,即使定位指令驱动触点置为ON

OFF,在脉冲输出中监控置为ON的期间,也请不要执行使用同一轴编号的定位指令。驱动时,请在脉冲输出中监控ON
OFF后,经过1个运算周期以上后再次驱动指令。
c)、使用用户中断时
定位指令驱动中,在多个扫描中进行动作,由于分别有上升沿、下降沿的处理,因此存在无法执行例如用户中断程序中的每个运算周期的情况,或在CJ指令中下达指令后不正常进行动作。但是,脉冲输出仍将继续。通过RUN中写入取消指令时,虽同样不进行正常动作,但脉冲输出停止。
略过了指令时,定位动作停止后结束标志位不置为ON。定位动作停止后,CJ指令的解除及通过中断程序重新执行了定位指令时,结束标志位置为ON。此外,略过了指令时,如果检测出全部输出禁止(SM8034)、脉冲停止指令、脉冲减速停止指令、行进方向的极限,则定位动作停止。用户指定的结束标志位置为ON,FX3兼容用的结束标志位不置为ON。
5、输入输出竞争功能
在定位中使用的输入输出的下述功能在同一软元件中无法指定多个。
┌─────────────────────┬─────┐
│ 输入 │输出(*1) │
├─────────────────────┼─────┤
│·高速计数器(A相、B相、预设输入、启动输入)│·PWM愉出 │
│·脉冲宽度测定 │·通用输出│
│·零点信号 │ │
│·中断输入信号1 │ │
│·外部开始信号 │ │
└─────────────────────┴─────┘
*1:在参数中将定位设定置为有效的输出软元件(Y),未使用定位时可作为无参数的PWM输出、通用软元件进行使用。但是,在参数中将定位设定置为无效时,无法将PWM输出、通用输出的软元件用于定位功能。此外,以参数进行PWM动作时,无法使用与定位相同的输出。
6、共享输入的功能
根据定位的参数,有可能占用输入中断的通道数。
a)、输入中断功能
下述定位功能的输入占用输入中断功能(X0~X17中最大8CH)。
• 输入中断*1
• 零点信号
• 中断输入信号1
• 外部开始信号
*1 可与其他功能重复使用。但是,边缘依据共存对象。
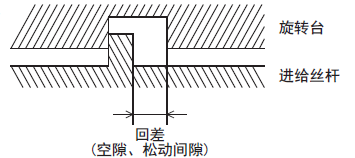
7、回差修正
定位功能不能修正机械单位制的回差(空隙、松动间隙)。如果需要修正,那么在移动方向反转时,请预先考虑回差部分,从而设定输出脉冲数。

8、结束标志位和定位动作结束
定位指令的结束标志位置为ON时,意味着指令的动作(脉冲输出动作等)结束了。并不意味着伺服电机的动作也结束(停止)了。为了确切掌握伺服电机的动作结束情况,请使用伺服放大器(驱动单元)具有的定位结束信号。
9、RUN中写入
请在定位指令执行中(脉冲输出中)避免RUN中写入。
对于在脉冲输出中包含下述定位指令的回路模块,进行RUN中写入时会出现下述动作,敬请注意。
此外,关于PWM也请避免RUN中写入。
┌────────────────────────┬──────────────┐
│ 定位指令 │动作中进行RUN中写入时的动作 │
├───────────┬────────────┼──────────────┤
│脉冲输出指令 │PLSY/DPLSY │立即停止脉冲输出。 │
├───────────┼────────────┼──────────────┤
│机械原点回归指令 │DSZR/DDSZR │减速停止脉冲输出。 │
├───────────┼────────────┤ │
│相对定位指令 │DRVI/DDRVI │ │
├───────────┼────────────┤ │
│绝对定位指令 │DRVA/DDRVA │ │
├───────────┼────────────┤ │
│中断1速定位折令 │DVIT/DDVIT │ │
├───────────┼─────┬──────┼──────────────┤
│可变速度运行指令 │PLSV/DPLSV│有加减速动作│减速停止脉冲输出。 │
│ │ ├──────┼──────────────┤
│ │ │无加减速动作│立即停止脉冲输出。 │
├───────────┼─────┴──────┼──────────────┤
│单独旋转台运行折令 │TBL │无法RUN中写入。 │
├───────────┼────────────┤ │
│多个旋转台运行折令 │DRVTBL │ │
├───────────┼────────────┤ │
│多个轴的旋转台运行指令│DRVMUL │ │
└───────────┴────────────┴──────────────┘
 销售部专线: 13418749887
销售部专线: 13418749887  全国服务热线:13418969887
全国服务热线:13418969887
